
通信方法、同期、プロトコル構造
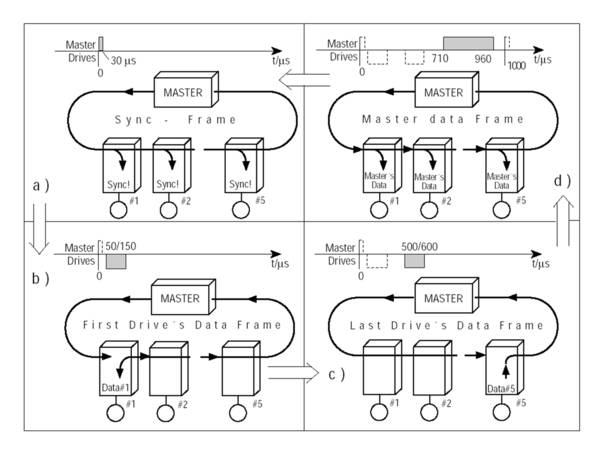
動作中のSercos通信は、初期化で選択されたサイクルタイムでマスター/スレーブ通信として周期的に行われます。62 µs、125 µs、250 µs、または最大65msまでの250の倍数が可能です。サイクルタイムは、コントローラーとドライブで固定稼働サイクルタイムに必要な同期を確保するために規定されます。コントローラーは、常にSercosリングの通信マスターです。通信は3つの異なるタイプのメッセージで行われます。マスター同期メッセージ (MST) は、すべてのドライブで同時に受信され、NCとドライブで時間関連のすべてのアクションを同期するために使われます。マスター同期メッセージと同様に、マスターデータメッセージ (MDT) も全ドライブで同時に受信されます。リング上の全ドライブ用の周期データとサービスデータが含まれています。ドライブは割り当てられたタイムスロットで連続してメッセージ (AT) を送信します。
 |
周期コントローラーと同程度の周期デジタルドライブ間の同期はマイクロ秒の精度を持ちます。実際値は全デジタルドライブで厳密に同時に測定され、コマンド値はすべて同時に有効となるため、接続された全デバイスで正確な調整が保証されます。1マイクロ秒より下の同期精度は、デジタルドライブ、選択された伝送速度、設定されたサイクルタイムには依存しません。60m/秒速1マイクロメートルの寸法精度は、1マイクロ秒の時間精度に一致します。
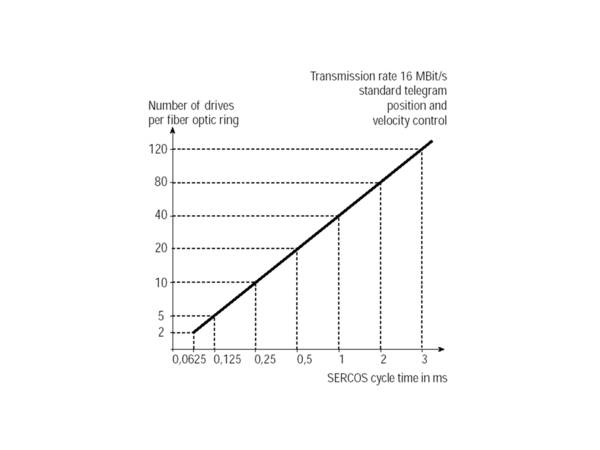
Sercosの第1世代は2、4Mbit/sの伝送速度をサポートするのに対して、 Sercos II は2、4、8、16Mbit/sの伝送速度をサポートします。リングごとに使用可能なドライブ数は通信サイクルタイム動作モード、通信速度により決定します。各コントローラーのドライブ数は、必要に応じて複数の光ファイバーリングで拡張できます。
 |
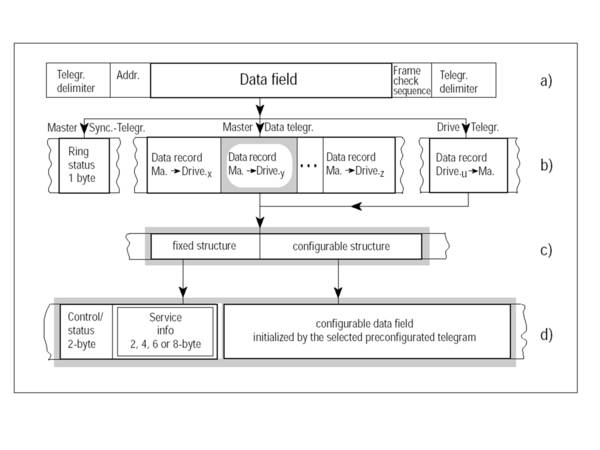
リアルタイムデータを設定可能なことにより、他のどの動作モードも独立して使用が可能です。サービスデータは、マスターからの要求があった場合のみ交換されます。サービスデータは、サービス情報フィールドの2、4、6、または8バイト分割ハンドシェイク手順で伝送されてからレシーバで再構築されます。NRZI コード HDLC プロトコルが通信に使用されます。各通信サイクルでは、リアルタイムデータはいわゆる設定可能データフィールドで伝送します。初期化で、識別番号システムがどちらのリアルタイムデータを伝送するかを指定します。コマンド値や実際値などの数値データは別として、それらは I/O 命令のあるビットリストとなることも可能です。特定のリアルタイムデータのある優先度の高いメッセージは、3つの基本動作モードであるトルク制御、速度制御、位置制御のほかに、速度/位置複合制御でも指定されます。
 |